The Three Components of the Da Vinci System
The Da Vinci Surgical System is not a robot that operates autonomously. It is a surgeon-controlled robotic platform: every movement is initiated and controlled by the operating surgeon in real time. The system has three physically separate components that work together.
1. The Surgeon Console
The surgeon sits at the console — positioned 5–10 metres from the patient — and views a 3D high-definition image of the surgical field. Hand controls (masters) translate the surgeon's hand movements directly to the robot arms. The console provides:
- Binocular 3D view at up to 10× magnification with genuine depth perception
- Motion scaling: a 5 cm hand movement becomes a 5 mm instrument movement
- Tremor filtration: physiological hand tremor is electronically filtered before transmission to instruments
- Ergonomic seated position that reduces surgeon fatigue in long procedures
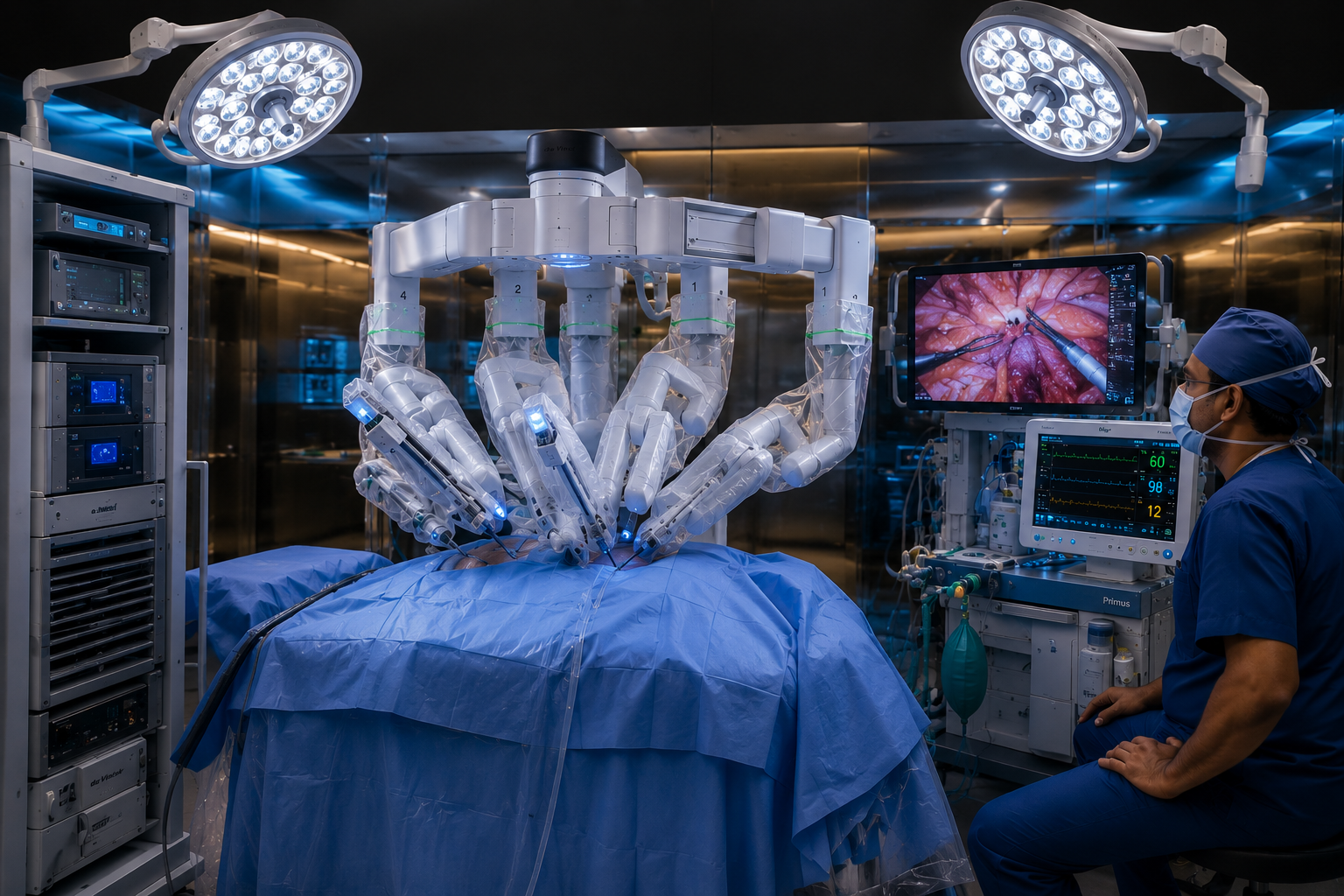
2. The Patient-Side Cart (Robot)
The patient-side cart is positioned next to the operating table and holds 3–4 robotic arms. One arm holds the camera (endoscope); the other 2–3 arms hold surgical instruments. Key features:
- EndoWrist instruments: Articulating instruments with 7 degrees of freedom — equivalent to the full range of motion of a human wrist, able to rotate 540°
- 0.8–1.2 cm ports: Each instrument enters through a smaller incision than conventional laparoscopy (which requires 2–3 cm trocars)
- Instrument range: Needle drivers, scissors, graspers, clip appliers, bipolar/monopolar energy, retractors, stapling devices — all in robotic EndoWrist form
- A bedside assistant remains at the table to change instruments, pass sutures, and respond to the console surgeon
3. The Vision Cart
The vision cart processes and displays the 3D HD surgical image on large monitors visible to the team, records the procedure, and runs the system software. It also serves as the hub for the Firefly fluorescence imaging module when used for intraoperative bile duct or tumour margin delineation.
Da Vinci Models — Current and Past Generations
| Model | Released | Arms | Key Features | Status in India |
|---|---|---|---|---|
| da Vinci Si | 2009 | 4 | First dual-console; HD 3D vision; introduced robotics to India | Still operational at some centres |
| da Vinci Xi | 2014 | 4 | Overhead arm mounting; full table-motion integration; laser port targeting; Firefly fluorescence | Most common; used at Dhaara Speciality Hospital |
| da Vinci X | 2017 | 4 | Streamlined Xi at lower cost; compatible with Xi instruments | Present at multiple Indian centres |
| da Vinci SP | 2018 | 3 (single port) | All instruments through single 2.5 cm incision; arms articulate inside the body | Select urology centres |
| da Vinci 5 | 2024 | 4 | Force feedback (haptics); AI assistance; 10,000 instrument movements/second processing; integrated vision | Being introduced at flagship centres 2025–2026 |
EndoWrist vs Laparoscopic Instruments — Key Differences
| Feature | Da Vinci EndoWrist | Laparoscopic Instrument |
|---|---|---|
| Degrees of freedom | 7 (full wrist articulation) | 4–5 (limited wrist) |
| Wrist rotation | 540° (beyond human hand) | 0° (fixed shaft) |
| Tremor | Electronically filtered | Transmitted from surgeon's hand |
| Motion scaling | Adjustable (1:1 to 5:1) | Fixed 1:1 |
| Force feedback | None (Xi/X/SP) · Partial (da Vinci 5) | Direct tactile feedback to hand |
| Suturing in tight spaces | Excellent — wrist articulates at target | Difficult — lever physics restrict motion |
What Da Vinci Cannot Do
- No haptic feedback (Xi/X): The surgeon cannot feel tissue tension through the standard system. This is compensated by visual cues and experience — but is a genuine difference from open surgery.
- Not autonomous: Every motion is surgeon-initiated. The system cannot perform a surgical step independently.
- Cannot retrieve large specimens: After robotic resection, a separate extraction incision is needed for large specimens.
- Setup time: Docking the robot adds 10–20 minutes to OT time — an overhead not justified for very short procedures.
Da Vinci at Dhaara Speciality Hospital, Bengaluru
Dhaara Speciality Hospital, Yelahanka, Bangalore uses the Da Vinci Xi system for robotic HPB (liver, pancreas, bile duct), GI, hernia, oncology surgery (Dr. Srinivas Bojanapu — MBBS, MS, FACRSI, DrNB, PDF) and robotic gynecologic surgery (Dr. Prathima Srinivas — MBBS, MS OBG). Book a consultation →